The Walkway system is used to measure footplate force and pressure data needed to assess standing balance and gait. The system includes an 8-foot walkway (equipped with force sensors) and Tekscan software. The software assesses patient movements by generating gait tables (e.g., velocity, steps/min, cadence), raw force data, video, footplate pressure mapping, and other data.
-
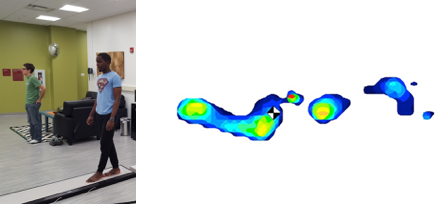
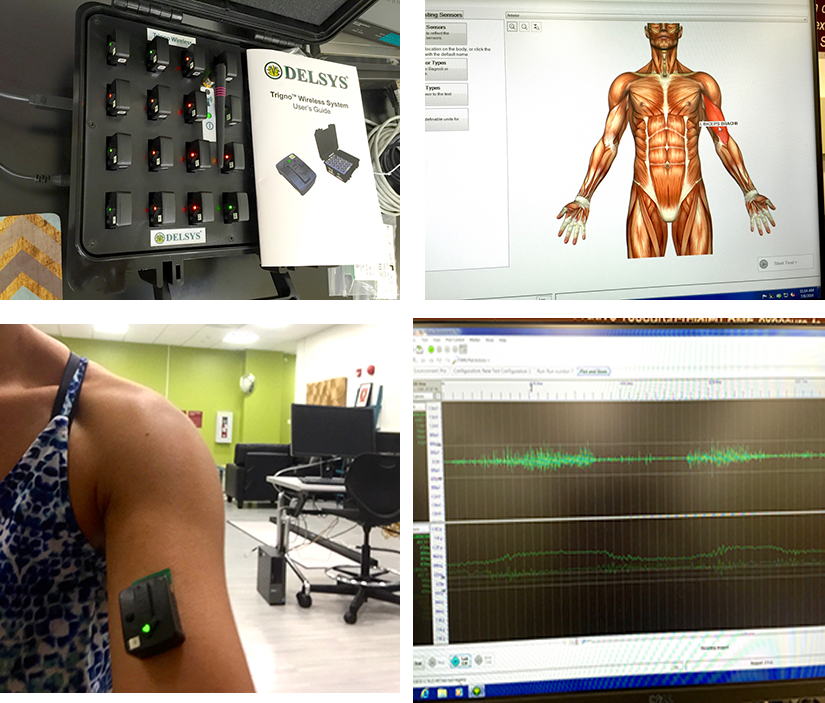
Student athlete standing on the Tekscan Forceplate Walkway (left) as center-of-pressure and force data is acquired (above)
-
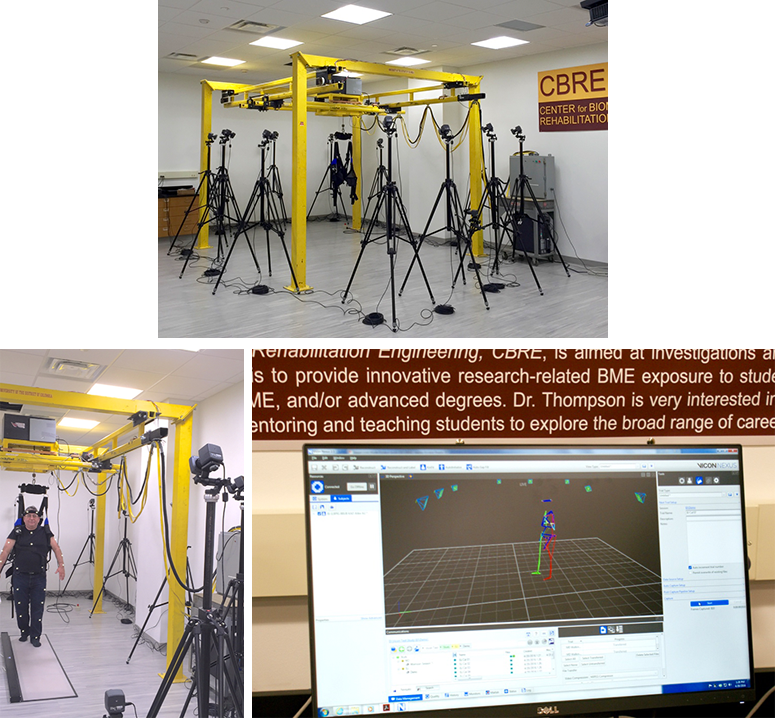
The Vicon motion capture system is an infrared marker-tracking system that utilizes ten cameras around the perimeter of the capture volume. The equipment is outfitted with infrared (IR) optical filters, IR light emitting diodes (LEDs), and a set of reflective markers. The reflective markers are arranged on the body of the subject, and reflect the IR radiation emitted by the LEDs. The Vicon software system is equipped to interact with the camera automatically. The software then processes the images taken from the cameras to construct a three-dimensional representation of the markers. This allows for images, videos, and kinematic analysis of the human subjects during movements (e.g., standing balance and gait). The system is shown below.
Top: Vicon Motion Capture (cameras on tripods) and NaviGAITor system (yellow gantry); Bottom: Subject using the Vicon markers, Tekscan Forceplate Walkway and NaviGAITor system (left) & Vicon Motion Capture software (right)
The NaviGAITor is an ambulatory suspension and rehabilitation apparatus developed by Devdas Shetty (Dean of SEAS). This relatively new device is being used for both clinical and research applications. UDC is home to 1 of only 2 NaviGAITor systems that exist nationwide. The NaviGAITor system (shown below) can be used in physical therapy and treatment for patients with muscle weakness, and neurological or musculoskeletal injuries and diseases. This system enables exercise and allows movement training in all three planes of motion without risk of injury due to falls. The operation of the entire system can be directed manually or automatically.
-
Top: Vicon Motion Capture (cameras on tripods) and NaviGAITor system (yellow gantry); Bottom: Subject using the Vicon markers, Tekscan Forceplate Walkway and NaviGAITor system (left) & Vicon Motion Capture software (right)
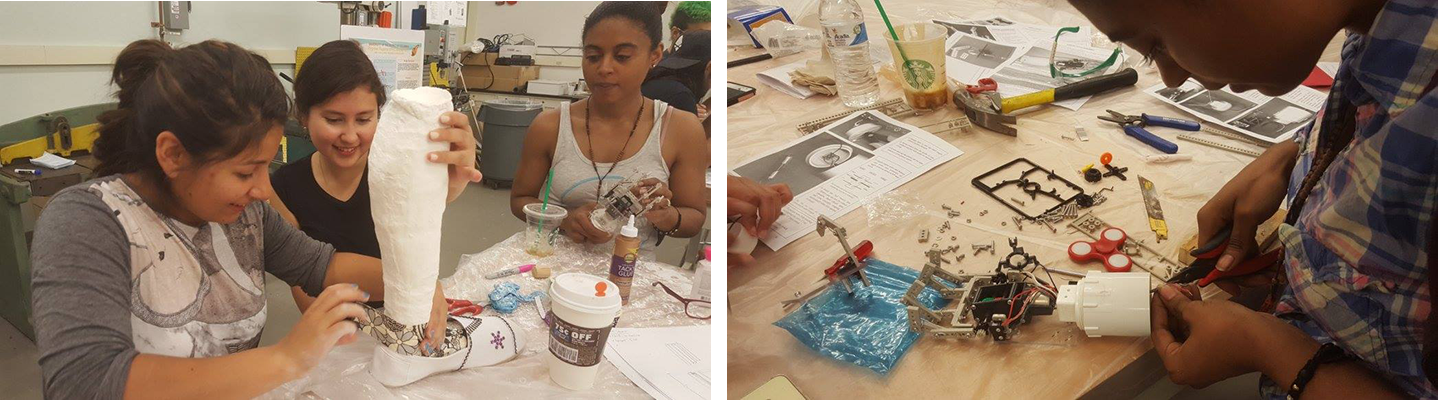
The Open Bionics, Inc. prosthetic hand is a 3D printed hand that is controlled by actuators, which move each individual finger. For control of the prosthetic, robotic hand, an Arduino programming environment and ATMEGA 2650 microcontroller are used.
The Portable Harness Ambulatory System (PHAS) Generation 1 Prototype was constructed from a design produced by UDC’s Mechanical Engineering faculty and students. The main concept behind the PHAS Generation 1 was to allow user to operate the device on their own (e.g., to lift oneself from a seated position, such as wheelchair to standing position). The purpose of this prototype is to aid individuals who suffer from balance impairments by enabling them to exercise in their home environment.